
-
本学科で行っている研究の一部を紹介します。詳細は各教員の研究のページをご覧下さい。
養豚の自動化のためのカメラによる豚の体重測定システム
家畜の体重を測定することは生育状況や出荷の目安を知るのに重要ですが,労力の問題から多くの家畜農家では体重測定を行わずに目視のみで体重を推定しています。そのため,豚の出荷の際に体重を自動的に測定し,適正体重に達した豚のみを出荷する自動選別システムの開発を行っています。 紹介動画1(約5MB)
紹介動画2(YouTubeに移動します)
紹介動画1(約5MB)
紹介動画2(YouTubeに移動します)
|
 豚のソーティングシステム |
スポーツを医工連携でサポート!
| カヌーに8台のカメラを設置し、選手の動きを三次元的に計測・解析するシステムを開発しています。カメラから得られた画像をコンピュータに取り込み、コンピュータプログラミングによって選手の動きを数値化します。数値化されたデータを基に選手の動きをアニメーションで表現することを行っています。 |  カヌー選手の運動解析のための 画像処理システム |
医療福祉に工学の力で貢献したい!
 表情筋電位を利用した 車椅子の制御 |
首から下が動かない下半身不随など重度の障がい者のために、顔の表情筋の動作を推定し、その推定結果を入力として電動車椅子を制御するシステムの研究を行っています。走行領域に障害物がある場合でも安全に走行できるようにセンサを用いて障害物の検知を行い、電動車いすのスピードを制御する機能を有しています。 |
農工連携で食糧問題に対応!
| 気候変動や災害の影響を受けない植物工場は農業分野に自動制御技術を応用したもので、今後の実用化が期待されています。この研究では、光源制御技術と生育状態を数値化するための画像計測技術を組み込んだネットワーク対応型の植物育成システムの開発を目指しています。その他、同様な技術として、漁業分野における高機能陸上養殖システムの開発にも取り組んでいます。 |  植物自動育成システム |
燃料電池、二次電池、バイオマス変換用機能触媒の開発
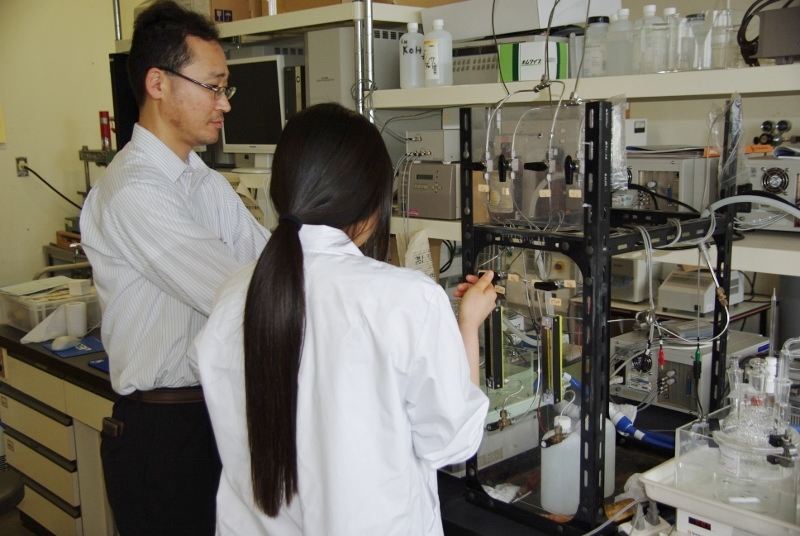 多様な用途に対応できる 新たなエネルギー源の開発 |
環境化学系の研究分野として、固体高分子型燃料電池(発電)、ニッケル水素二次電池(蓄電)、セルロース分解用機能触媒(燃料)の研究開発を行っています。この画像は、燃料電池用の新規電極触媒の特性を評価しているところです。固体高分子型燃料電池は、主に移動用電源(自動車やロボットなど)への応用が期待されています。 |
コンピュータビジョンに関する研究
 粒子フィルタを用いた動画像追跡 |
カメラをコンピュータ・ロボットの目として使用するコンピュータビジョンに関する研究を行っています。動画像中の物体の運動を追跡する方法や、逆に複数・単一のカメラを用いた動画像から、環境の形状やカメラ自身の運動を推定する方法の開発を行っています。 |
自律移動ロボットの開発
現在移動ロボットの適用範囲は災害被災地、宇宙から一般家庭まで幅広くなっています。そこで、ロボットが環境の状況を自分で認識し、適切な行動を自分自身で決定し環境内を安全に移動する方法の開発を行っています。また、複雑な動特性を持つロボットを適切に動かすための制御システムの開発に関する研究も行っています。
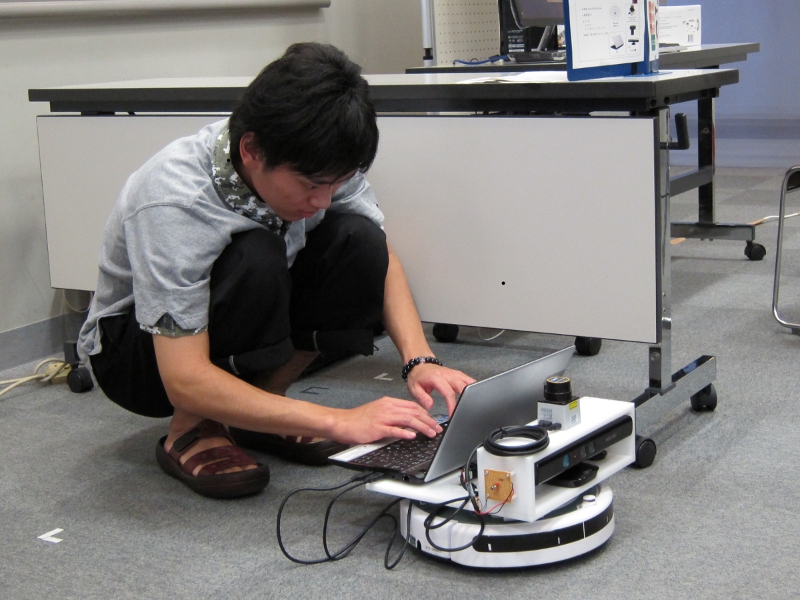 掃除機型移動ロボット |
 クアッドロータの制御 |
3次元サーモグラフィーの開発
| 一般のサーモグラフィ-は二次元の温度画像であるため、対象のサイズや凹凸が判断できないという問題があります。そこでサーモグラフィ-に三次元形状計測機能を追加することで、立体的な温度分布を計測することを可能にしています。温度分布が三次元化されるので、コンピュータ上で様々な方向から対象の温度状態が確認できるようになります。 | 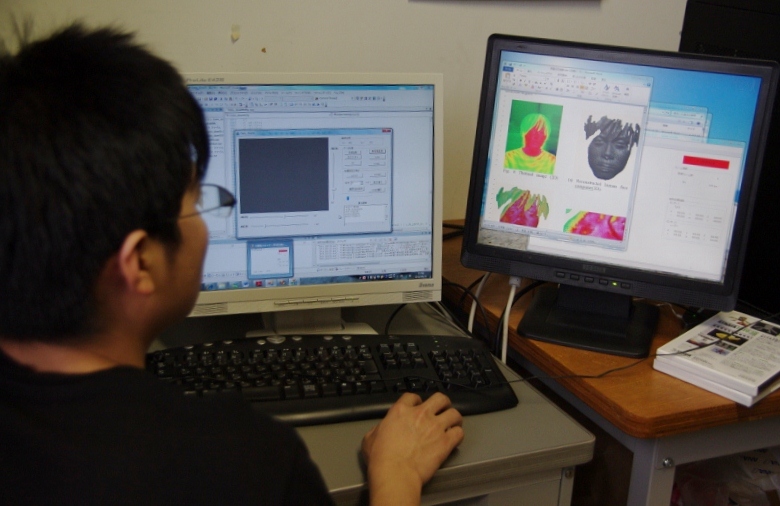 三次元サーモグラフィー
三次元サーモグラフィーによる顔画像処理 |
ロボットビジョンを組み込んだロボットアームに関する研究
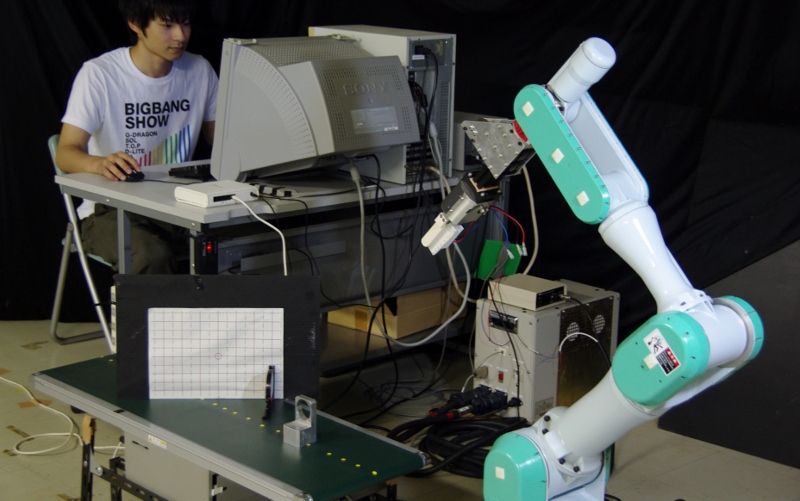 多関節ロボットアームを用いた実験風景 |
ロボットに視覚をもたせることで、より複雑な動作を行うことができるようになります。ロボット自身が回りの環境を把握して、その状況に応じた動きを行うことを実現しています。本研究では、特に三次元のロボットビジョンを用いた研究を行っています。 |
下水管形状計測ロボットの開発
| 近年、国内の下水管が老朽化し、道路陥没事故が増加しています。多くの下水管は直径60センチ以下であり人が入れないため、カメラを搭載した自動走行車による検査が一般的に実施されています。本研究では、自動走行車にレーザスキャナと画像計測技術を組み込み、下水管の形状を計測する高機能ロボットを開発しています。 | 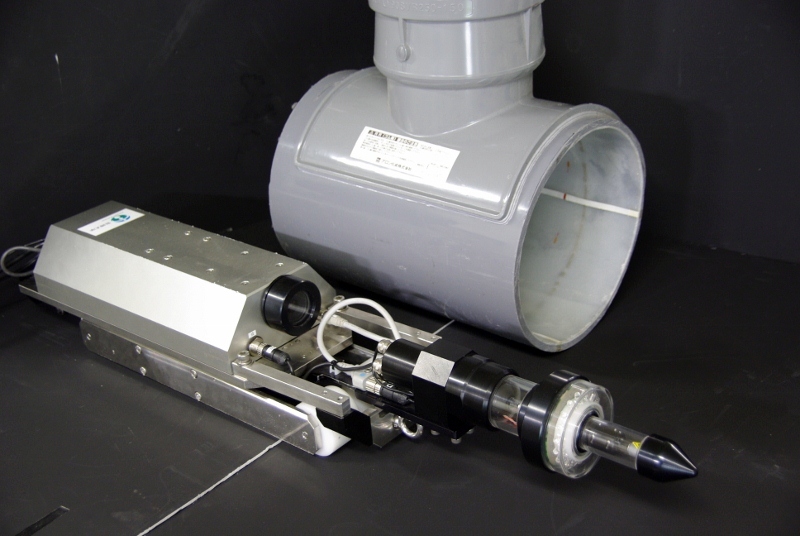 下水管形状計測ロボットの外観 |